3.1.0
We want a function that maps joint configuration to its corresponding end-effector pose.
where is the task space and is the joint space
and are specific to a robot and a task.
is of size where is the number of Degrees of Freedomin joint space.
is of size where is the number of Degrees of Freedom in task space.
3.1.1
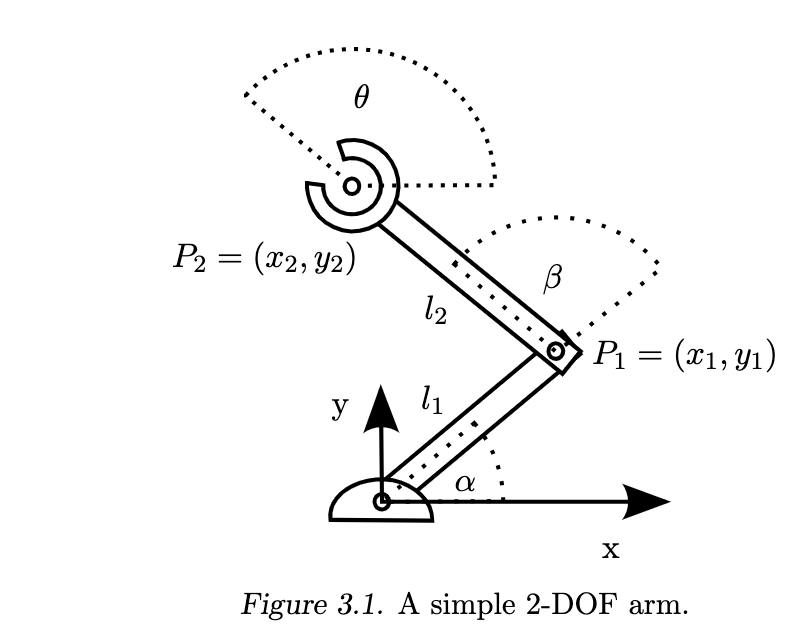 Take this simple robot arm.
Take this simple robot arm.
, since are fixed. We want You can find using simple trig. Finding is very similar. the orientation of is simply .
Definition: Configuration Space
Each joint cannot take on arbitrary angles. For instance, , because otherwise the arm would try to go through the table it is resting on. However, is effectively unlimited: . These constraints define Configuration Space
3.1.2 Denavit-Hartenberg notation
The above procedure is not scalable, but it effectively no different from a series of Homogenous Transformation. the DH representation is defacto standard.
In order to generically preform linear transformations up a robot arm to determine the position of an end effector, we need to establish a coordinate system for each joint. For each joint, we establish the z-axis as the axis of rotation for a revolute joint and the axis of translation for a prismatic joint. (whatever that means!)
Next, we define the x and y axes for the root joint (relatively arbitrary)- then for each subsequent joint find the line perpendicular to each z-axis (aka the common normal) and intersects both. This line becomes the x-axis for the next joint, and it points away from the previous joint. Then using the RHR you can find the y-axis for the joint.
The transformation between joints is then fully described by
- The length of the common normal where it intersects the two z-axes of the two joints and .
- The angle between the old and the new z-axis, measured about the common normal
- The offset along the previous z-axis to the common normal.
- the angle from the old x-axis to the new x-axis, about the previous z-axis.
You can then define a transformation and apply them in a chain a la Frames of Reference.