describes a unique joint configuration. Forward kinematics uses to find the end effector pose. The goal of Inverse Kinematics (IK) is to find a joint configuration that results in a desired end effector pose. i.e.
For a mobile robot, we also need to consider local velocities.
3.2.1 Solvability
If - or the number of DoF of joint space is less than - the number of DoF of task space then there may be poses in task space that are not in joint space, creating an infeasible situation.
3.2.2 IK of a Simple Manipulator arm
Consider this robot arm:
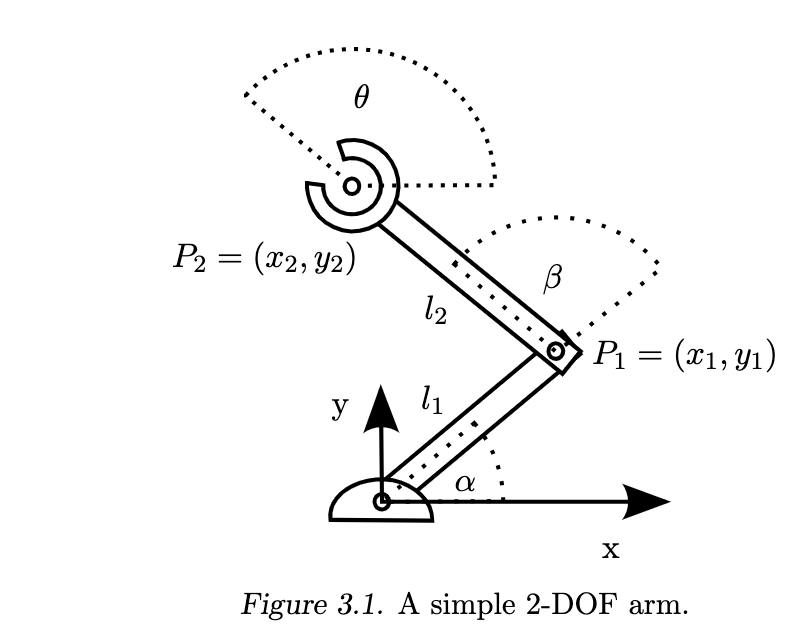 We need to solve for
We need to solve for
Consider only the first link, . Solving for yields two solutions:
one above the table and one below.
Solving even just for becomes cumbersome. Is there a scalable solution?
If we specify not only the position but also the orientation, then the desired pose will have the form we can simplify this, yet this still does not scale well.
Let’s use optimization. You can define the euclidian distance between the current pose and the goal pose as a function of , then minimize. This will find a local minima.